The goal of this module is to learn about the HC-SR04 Ultrasonic Sensor. This sensor will allow you to measure th edistance from the front of the sensor to an object. The sensor has a range from 2 cm (3/4 inch) to 400 cm (157 inches) with 3 mm (1/10 inch) accuracy.
This module is derived from the module Simple Arduino and HC-SR04 Example.
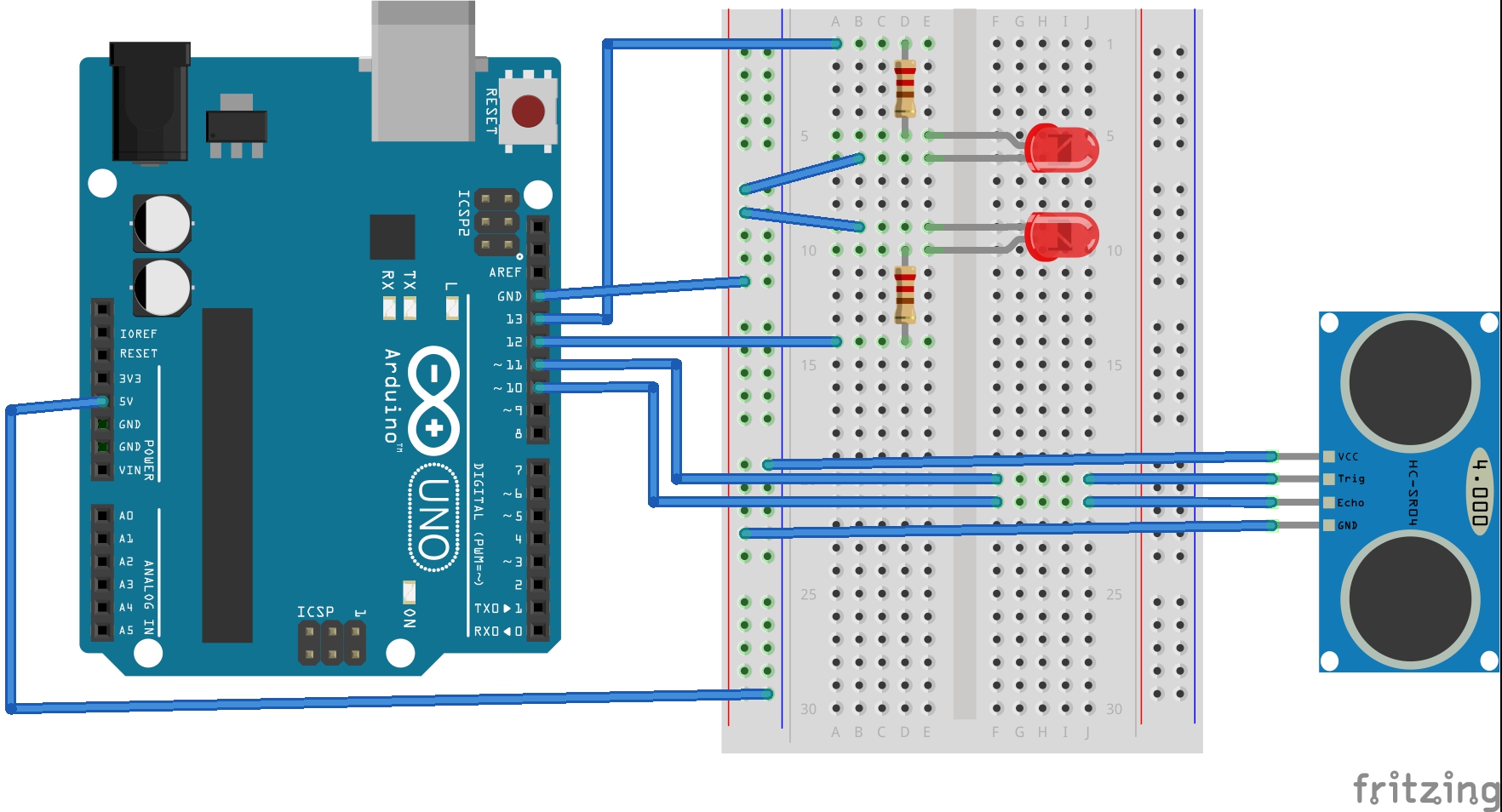
Note: You make click on the drawing above for a larger version.
LEDs are diodes. Diodes are electrical devices that only allow electricity to flow in one direction. It is very important that you orient the LED the correct way.
When connecting the LED, notice that one leg of the LED is longer than the other. The longer leg is the anode (the positive side). In the drawing the longer leg is the one with the bend in it (the lower leg in the picture above).
Even though both LEDs above are red, I would get one red and one green.
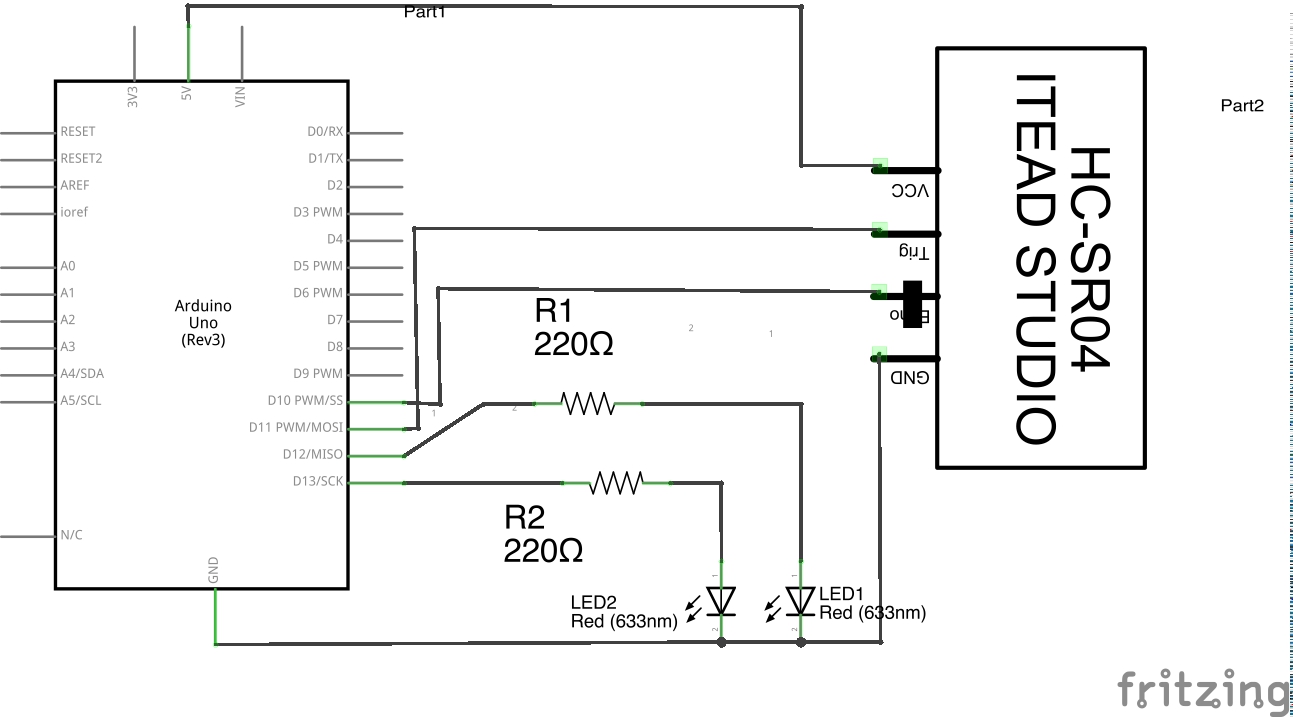
#define maxLed 13 #define minLed 12 #define trigPin 11 #define echoPin 10 int maximumRange = 200; int minimumRange = 0; int oneThird = (maximumRange - minimumRange) / 3; int twoThird = 2 * oneThird; int maxLedState; int minLedState; void setup() { Serial.begin (9600); pinMode(maxLed, OUTPUT); pinMode(minLed, OUTPUT); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); } void loop() { long duration; long distance; digitalWrite(trigPin, LOW); // Added this line delayMicroseconds(2); // Added this line digitalWrite(trigPin, HIGH); delayMicroseconds(10); // Added this line digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance = (duration/2) / 29.1; if ((distance <= minimumRange) || (distance >= maximumRange)) { // out of range maxLedState = LOW; minLedState = LOW; Serial.println("Out of range"); } // out of range else { // in range Serial.print(distance); Serial.println(" cm"); if (oneThird > distance) { // within first 1/3 of range maxLedState = LOW; minLedState = HIGH; } // within first 1/3 of range else if (twoThird > distance) { // within middle of range maxLedState = HIGH; minLedState = HIGH; } // within middle of range else { // at last 1/3 of range maxLedState = HIGH; minLedState = LOW; } // at last 1/3 of range } // in range digitalWrite(minLed,maxLedState); digitalWrite(maxLed,minLedState); delay(500); // wait a bit }Download code
[Arduino index | Modules index]